
Autonomous Vehicles · 2020
Pedestrian-Automated Vehicle Interaction Scoping Review
A scoping review of experimental methods for studying pedestrian-vehicle interaction in autonomous driving contexts.
One of the major challenges that autonomous cars are facing today is driving in urban environments. Autonomous vehicles need the ability to communicate with other road users, especially pedestrians, about their intention. However, the communication display of pedestrian-vehicle interaction used in autonomous vehicles are not well studied. A scoping review was conducted to understand the current state of research on pedestrian-vehicle interaction with a particular focus on on-road studies.
Team
Xin Ye, Xiao Yu, Dr.Jing Feng (Support)
Exhibition
@ NC State 2020 Summer Student Showcase
Duration
July 2020 - Aug 2020 (2 mo)
Methods
Meta-Analysis(PEISMA) model

Objective
This project aims to provide an overview of the experimental methods to study pedestrian-vehicle interaction in the context of autonomous driving.
Methods
META-ANALYSIS
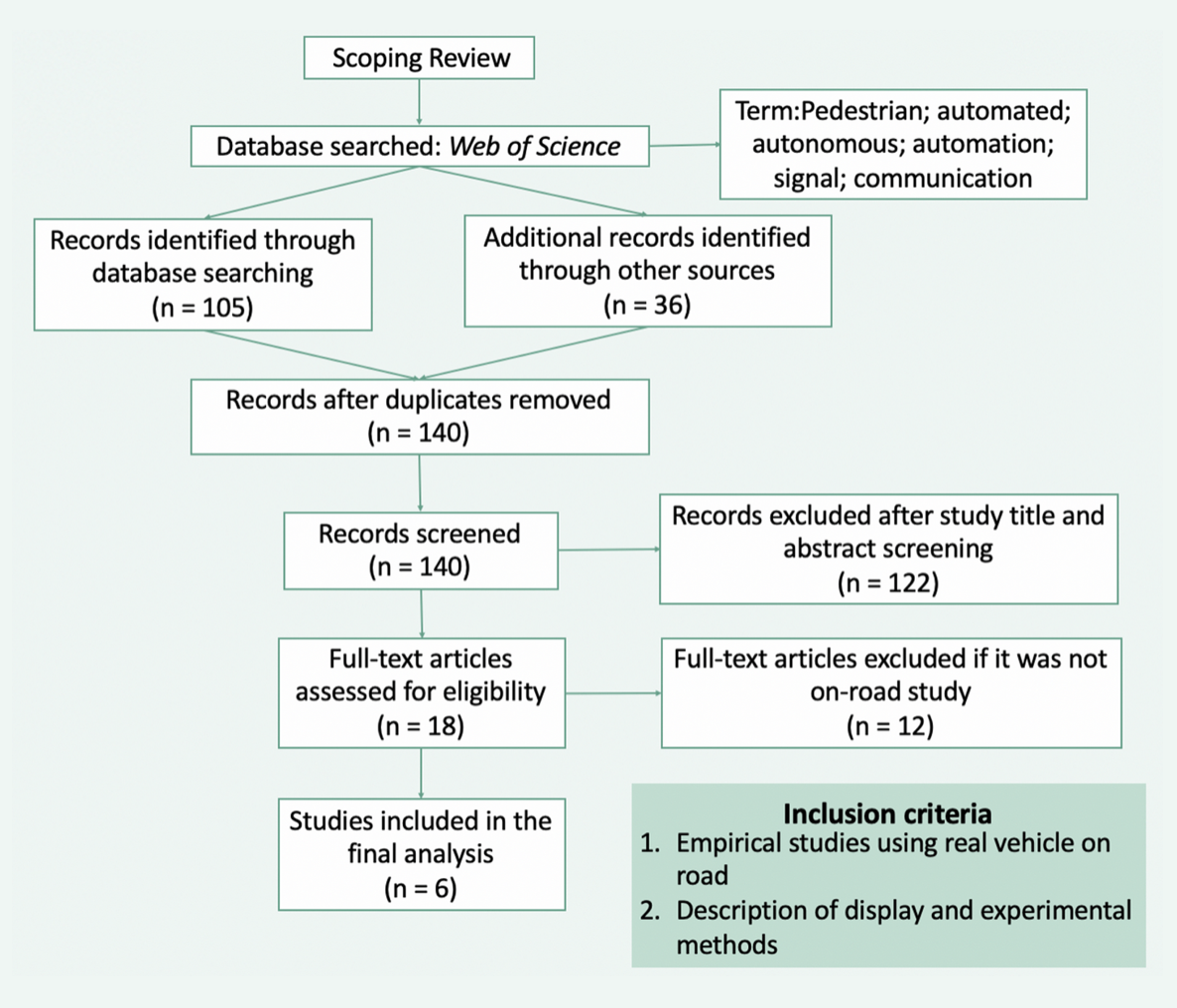
Flow diagram and search strategy using the Preferred Reporting Items for Systematic Reviews and Meta-Analysis(PEISMA) model.
Results
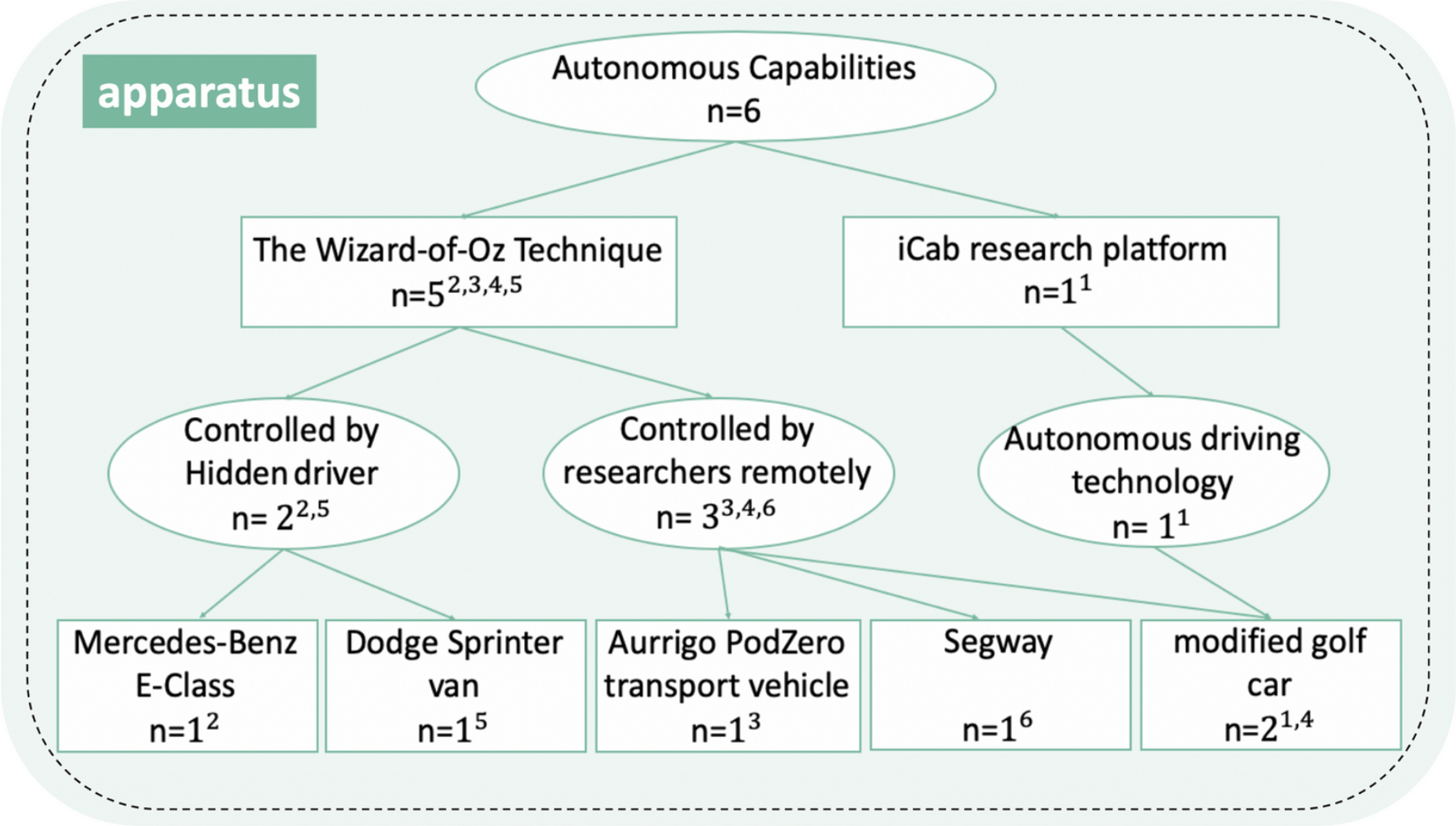
1. HOW TO REALIZE INTELLIGENT COMMUNICATION WITH PEDESTRIANS?
Most of the reviewed literature utilized the Wizard-of-Oz technique : The researcher controlled the vehicle and its different interface cues.
Only one literature utilized iCab to allow autonomous behavior and detection of obstacles.
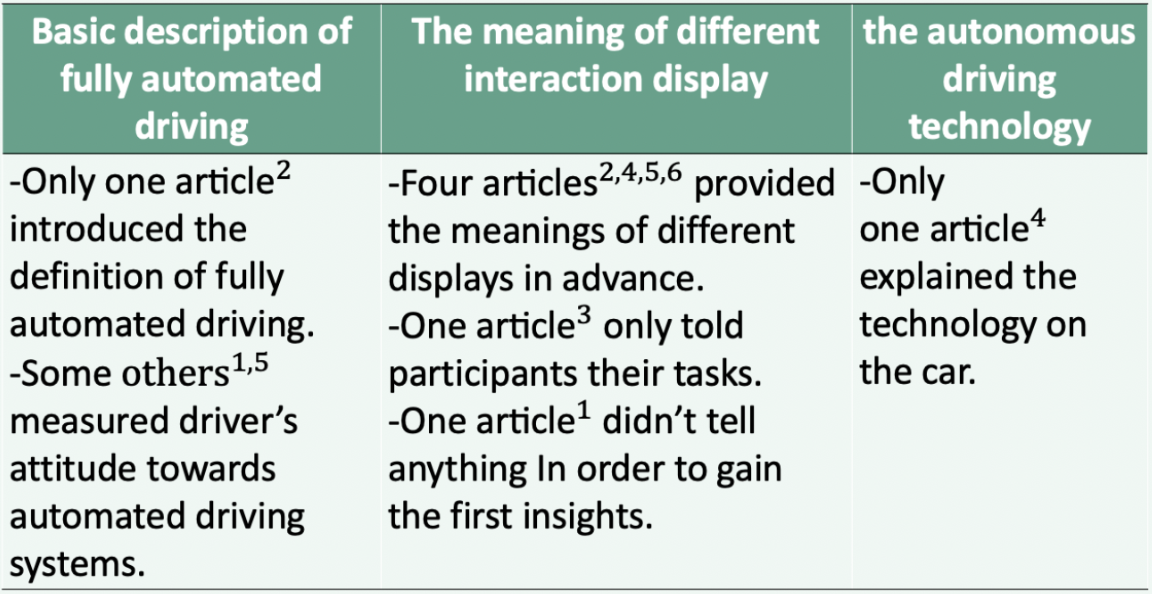
2. WHAT ANTICIPATION SHALL BE ESTABLISHED THROUGH INSTRUCTIONS AND SCENARIOS?
Instruction
Scenario

Most of the articles conducted experiments in parking lots.
3. HOW TO CONDUCT AN EXPERIMENT?
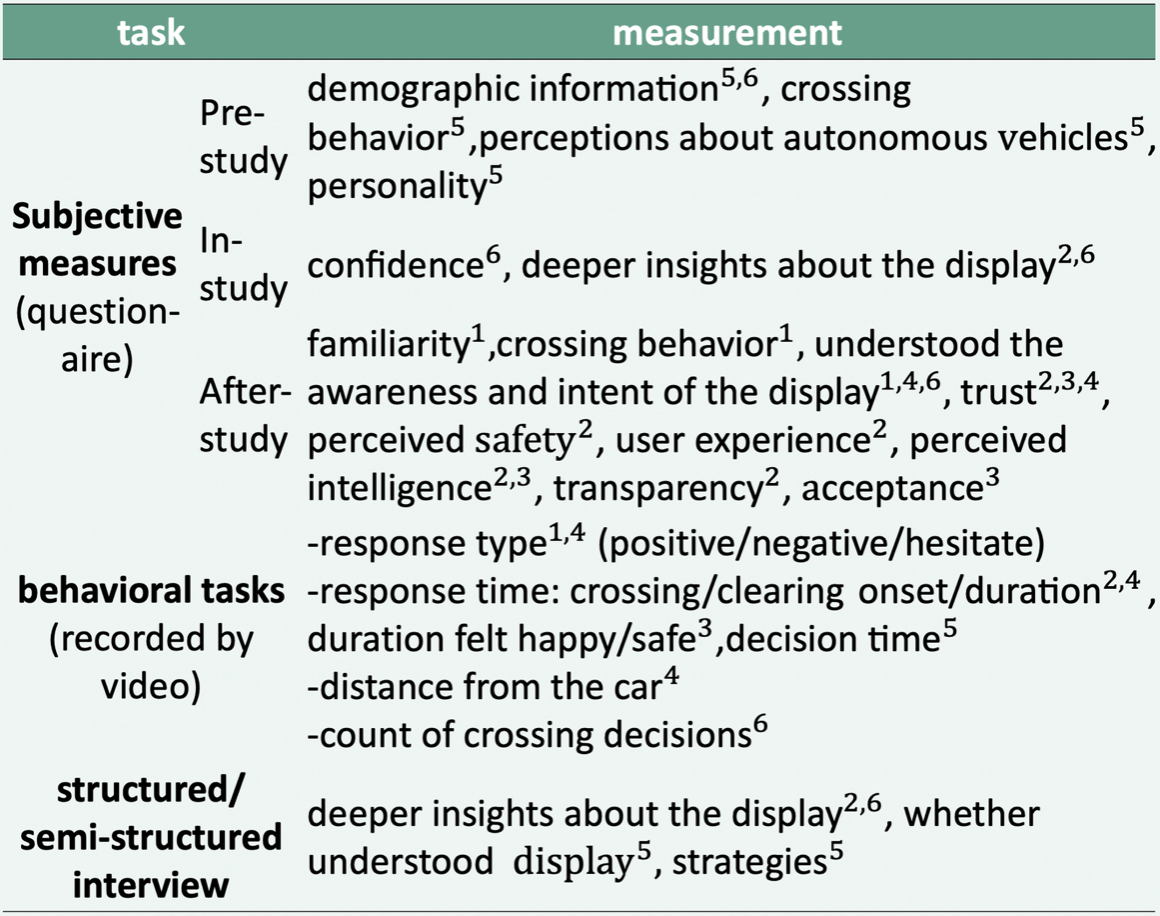
Five articles(2-6) ask participants to cross an intersection/road or step aside, one article(1) did not have any task.
Discussion
The Wizard-of-oz Technique is a good method for safety if the automation technology is still undeveloped.
Scenarios like intersection or parking lot are recommended since they are common traffic situations that require vehicle-pedestrian interaction.
Future studies can further explore whether the meaning of display could be understood directly without instruction or has to be learned as a convention.
References
Miguel, M. N. D. , Fuchshuber, D. , Hussein, A. , & Olaverri-Monreal, C. . (2019). Perceived Pedestrian Safety: Public Interaction with Driverless Vehicles. 2019 IEEE Intelligent Vehicles Symposium (IV). IEEE.
Faas, S. , Mathis, L. A. , & Baumann, M. R. K. . (2020). External hmi for self-driving vehicles: which information shall be displayed?. Transportation Research Part F Traffic Psychology and Behaviour,68, 171-186.
Burns, C. G. , Oliveira, L. , Thomas, P. , Iyer, S. , & Birrell, S. . (2019). Pedestrian Decision-Making Responses to External Human-Machine Interface Designs for Autonomous Vehicles. 2019 IEEE Intelligent Vehicles Symposium (IV).IEEE.
M. Matthews, G. Chowdhary, and E. Kieson. (2017). “Intent communication between autonomous vehicles and pedestrians.” [Online]. Available: https://arxiv.org/abs/1708.07123
M. Clamann, M. Aubert, and M. L. Cummings, “Evaluation of vehicle-to-pedestrian communication displays for autonomous vehicles,” Transp. Res. Board, Washington, DC, USA, Tech. Rep. 17-02119, 2017.
K. Mahadevan, S. Somanath, and E. Sharlin, “Communicating awareness and intent in autonomous vehicle-pedestrian interaction,” Univ. Calgary, Calgary, AB, Canada, Tech. Rep., 2017.