My research focuses on
robots deployed in public security and law enforcement,
exploring how people perceive, respond to, and interact with
security robots,
and how these systems can be designed and deployed in service of the
public good.
My work has been published in premier conferences and journals, such as ACM Transactions on Human-Robot Interaction, the ACM/IEEE International Conference on Human-Robot Interaction (HRI), the IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), and the Human Factors and Ergonomics Society Annual Meeting (HFES). Prior to my Ph.D., I earned an M.S. in Information Science from the University of Michigan and a B.S. in Psychology from Zhejiang University.
🔥 News
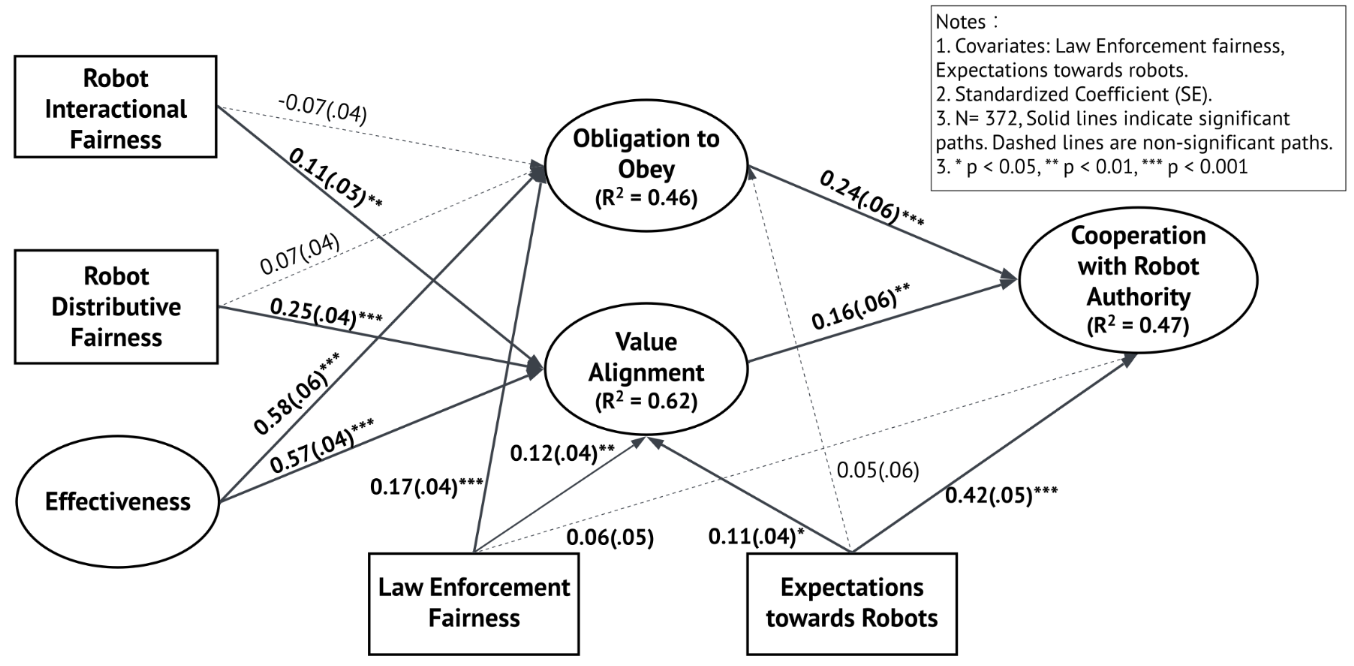
Dec 22, 2025: My paper “The Roles of Fairness and Effectiveness in Promoting Legitimacy and Cooperation with Security Robotic Authority” has been accepted as a full paper at HRI 2026 (23% acceptance rate)! 🎉🎉
Oct 13, 2025: Attended the 69th Human Factors and Ergonomics Society Annual Meeting (HFES 2025) in Chicago, IL and presented my paper “Rewarding Trust: How Reward Power Shapes Security Robot Acceptance”.
Aug 29, 2025: Attended the IEEE International Conference on Robot and Human Interactive Communication (RO-MAN 2025) in Eindhoven, Netherlands and presented my paper “Can Robots Take Over Security? A Brief Review and Critique of Security Robot vs. Human Security Agent”. 🤖👮
📝 Selected Publications
Embodied or Virtually Represented: Navigating the Embodiment Debate in Human-Robot Interaction
Connor Esterwood, Xin Ye, Ruijia Guan, Lionel Robert